

![]()
What is robosub?
RoboSub is an international competition that invites participants to tackle simplified versions of challenges facing the underwater maritime industry. These challenges may include oceanographic exploration and mapping, detection and manipulation of objects, and pipeline identification and tracking.
It is a competition whose goal is to advance the development of autonomous underwater vehicles by challenging a new generation of engineers to perform realistic missions in an underwater environment. It was launched in 1997 and is co-sponsored by the RoboNation and the Office of Naval Research.
RoboSub 2023 Team HandBook - Click Here
Competition Vehicle
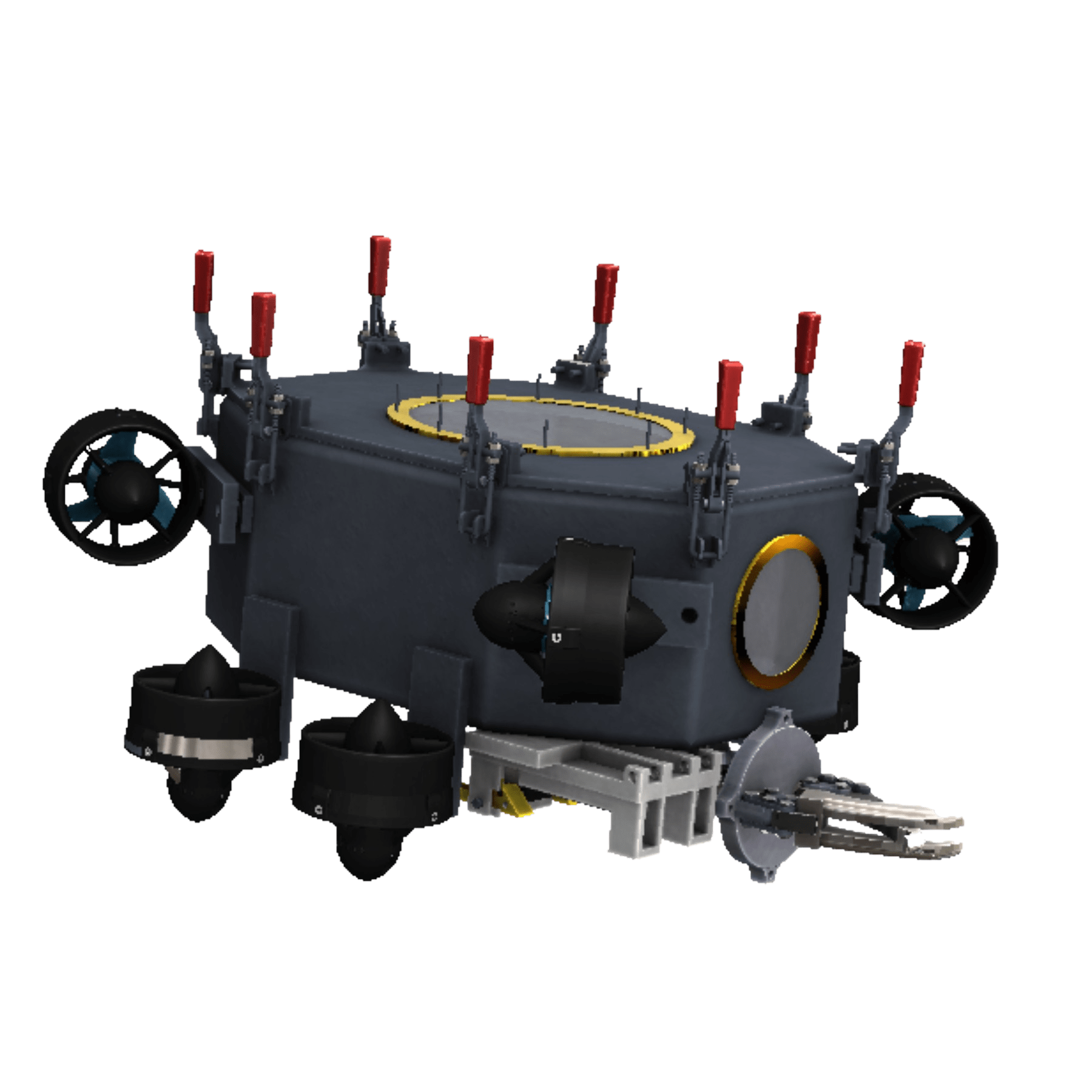
DUBURI 4.0
`` BRACU Duburi is participating in RoboSub 2023 ``
AUV 4.0 OverviewClick HereTechnical Design ReportClick HereBracu DUBURI 4.0 Mechanical System
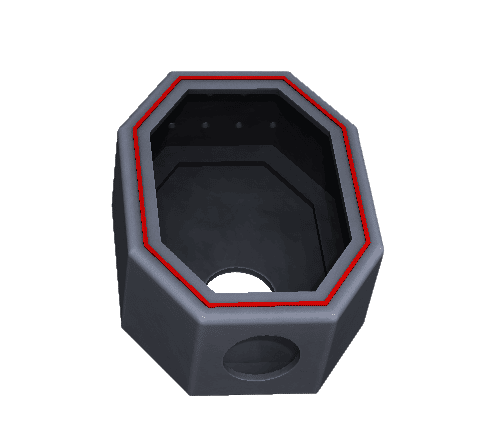
Our hull design consists of three primary elements: an external aluminum, an internal acrylic frame and a water-proof enclosure. For the version Duburi 4.0, the team has changed the main hull into a 16x12x6 inches octagon with curved edges. The octagonal shape distributes stress evenly across the structure, hence the rover will not experience any localized pressure while submerged underwater. Furthermore, this new dimension has led to a substantial decrease in weight of the AUV and a volume reduction of approximately 60 percent. The weight reduction minimizes thruster pressure, and a smaller dimension decreases surface area leading to a lower impact of drag force. As a result, mobility increases and acceleration becomes easier.......
View MoreClick HereBracu DUBURI 4.0 Electrical Architecture
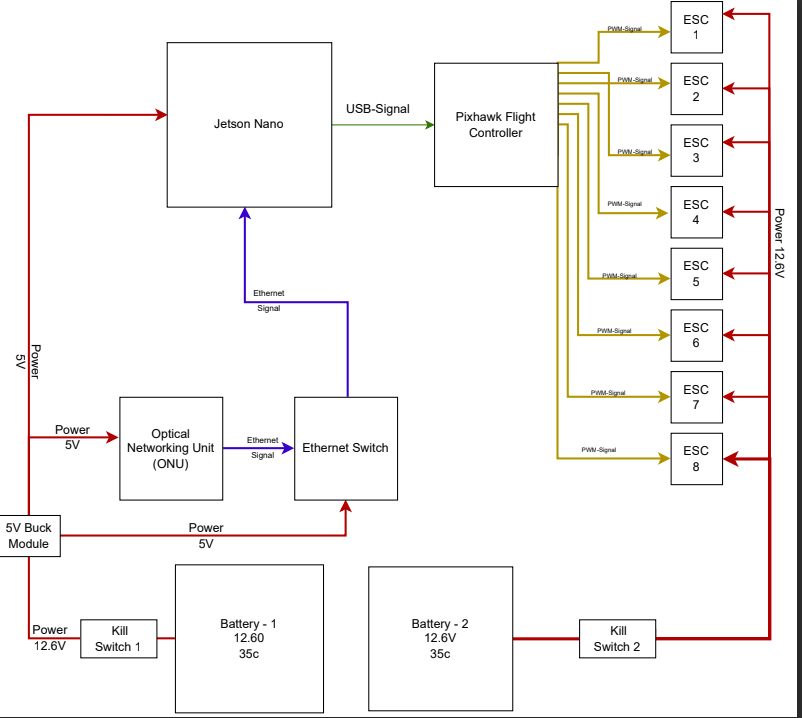
We have used 2 LiPo Battey in our rover, One of them is a 12.6V 5400 mAh 3 Cell battery and another one is a 12.6V 5200 mAh 3 Cell battery. We are using one of our batteries to power T200 Thrusters ESC. In this part, we are directly using full battery voltage without using any buck module, From Battery to the Thruster power connection we have implemented our DIY underwater switch, which can kill the thruster power in case of Emergency....
View MoreClick HereBracu DUBURI 4.0 Software Architecture
Duburi's Computer Vision subteam is in charge. Its job is to choose, train, and test Duburi's Machine Learning Algorithms for identifying objects underwater, which is an important aspect of Duburi's autonomous operation.
View MoreClick HereCompetition Strategy
This year, BRACU released version 4.0. Duburi has significantly enhanced its functionality and modified its system architecture in response to the lessons learned from RoboSub 2022. The new AUV’s construction, which promises to offer more underwater agility, is among the significant modifications. By eliminating extra space, the new design reduces weight and is more hydrodynamic than the previous one. Additionally, Duburi now has a Vectornav VN200 INS in place of its previous magnetic field-dependent IMU, which supplied inaccurate data in the event of any magnetic interference. This INS cal- culates its heading using data from the gyroscope and accelerometer. Due to Duburi’s focus on modular hardware and software this year, ROS (Robot Operating System) now powers Duburi.
A hot-swappable system and cleaner, better organized wiring are additional features of the newly created rover, which also includes quick maintenance options. The design, as a whole, effectively and quickly corrects all of the preceding flaws.
For more details, read our technical paper.
