
AUV Specification:
Weight (in Air)
61 lbs. (27.7kg)
Hull or waterproof Enclouser
19"x15 x7"
Dimensions
21*x 17 x 8"
Propulsion
8x Blue Robotics T100 Thruster
Power
2x 12V 10,000 mAh LiPo Batteries (in series)
Underwater Connections
SubConn Power, Circular, Micro Circular, Ethernet, and Coax series
Cameras
3x Blue Robotics 1080 P Low light cameras
Navigation Sensors
Pressure Sensor (Bar 30 Depth Sensor) IMU (Gy-88, SparkFun 9 Degrees of Freedom MU Breakout - LSM9DSO) Hydrophones (2x Teledyne Reson TC4013)
Main Computer
Jetson Nano Developer Kit, GPU: 128-core NVIDIA Maxwell" architecture-based GPU. - CPU: Quad-core ARM® A57.
Embedded Computer (Control)
AT mega 2560
Bracu DUBURI 3.0 Mechanical System

Hull Design Of Duburi 3.0
The new hull consists of a newer approach to keep with the demands of the ever developing AUV. The new design consists of a full aluminium chassis with openings to attach windows for better view and to increase the visibility for cameras. Which is a must considering the competition tasks which require a proper working vision system. The new design provides more space for components, better maneuverability and incorporates the newer 8 thruster design leaving behind the past 6 thruster design.
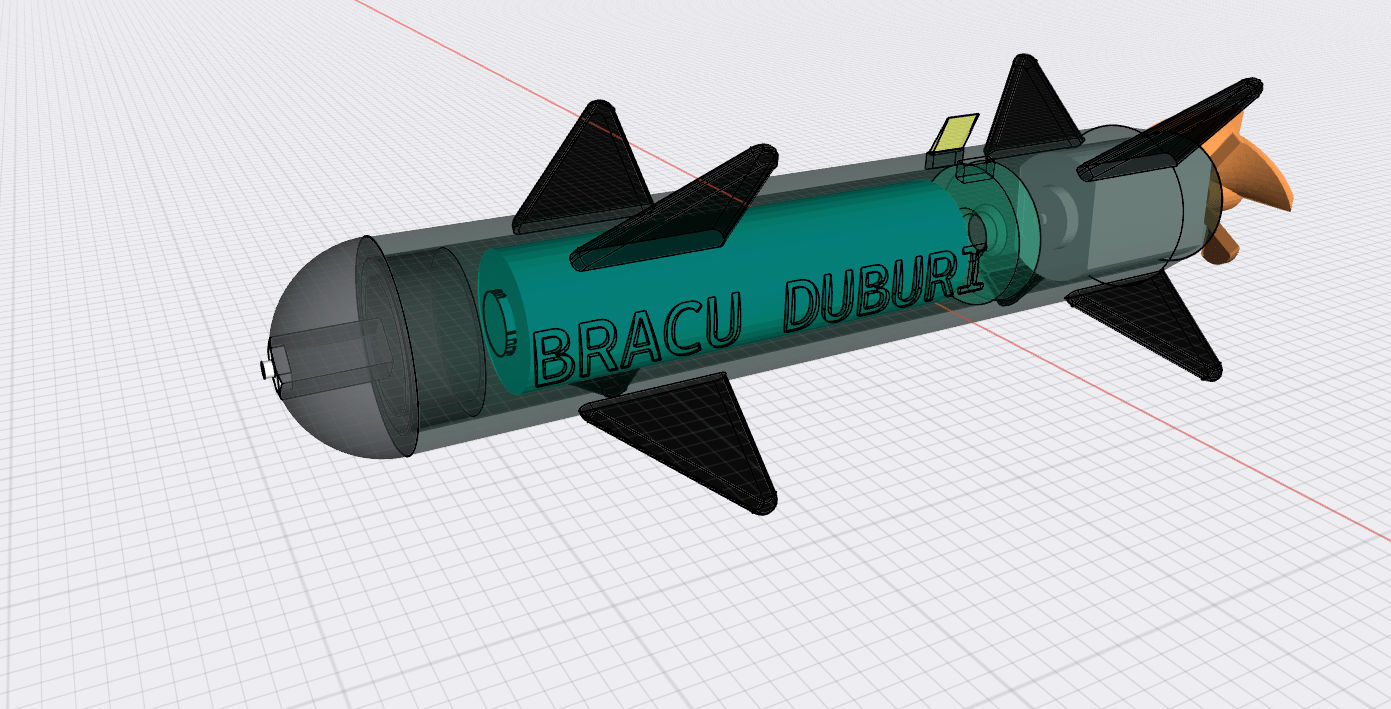
TORPEDO DESIGN OF DUBURI 3.0
This year's new torpedo is designed specifically keeping the RoboSub 2022 in mind. The torpedo was designed with the overall complexity and cost in mind. The torpedo is self propelled via a reverse engineered DC motor to work underwater. The main enclosure contains the electrical components and the Lithium ion battery that is used to propel the torpedo forward. The use of 3D printed components keeps the overall cost as low as possible and the use of an electrical system was used to avoid any harmful materials as a substitute.
Bracu DUBURI 3.0 Electrical Architecture
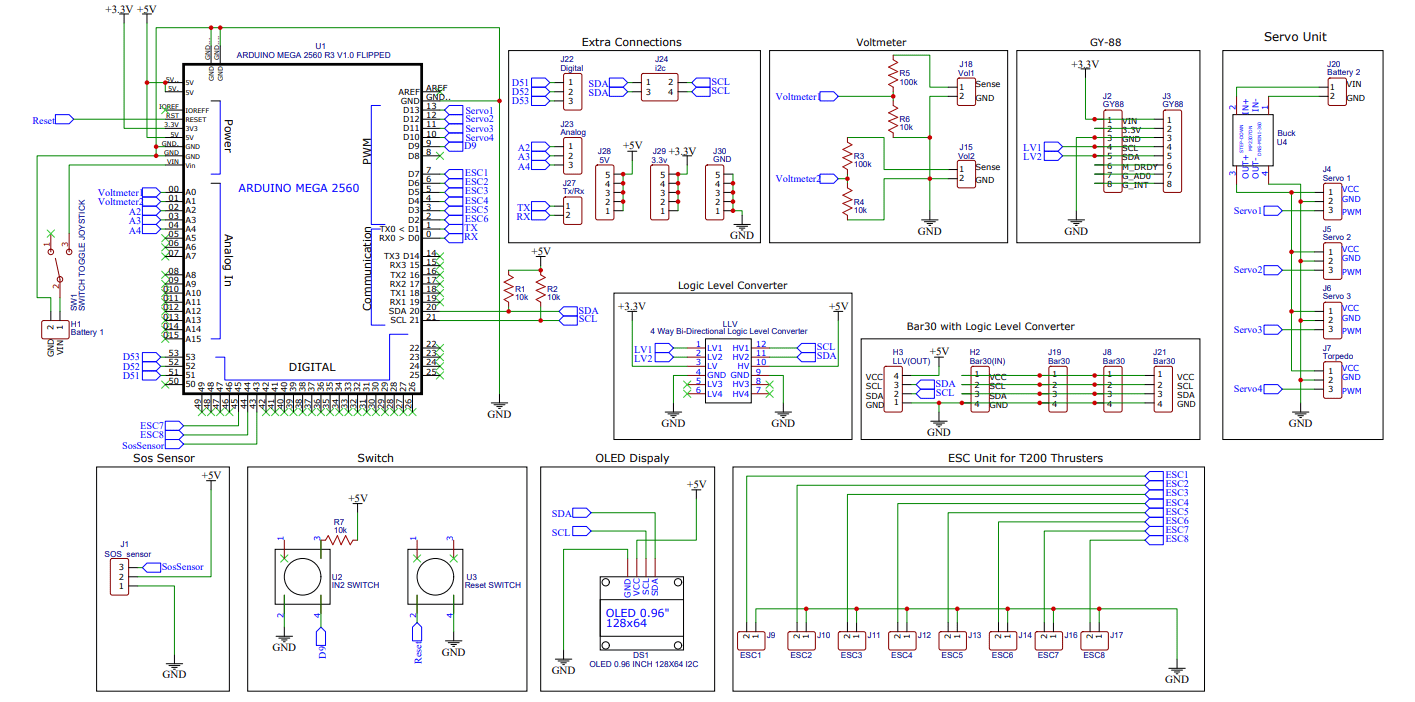
PCB OF DUBURI 3.0
Duburi has its custom designed PCB that relays and connects all the sensors and electrical components keeping in component failures in mind. In order to swap sensors in case of failure. Apart from that also does not contain unnecessarily wiring.

NAVIGATION SYSTEM
For this years navigation system we have used GY-88 for compass and to recognise the orientation of the AUV. Also the new robust computer vision implementation recognises the objects and guides the AUV to its next goal
Bracu DUBURI 3.0 Software Architecture
Simulation
The environment was built using Unity. The model of Duburi was placed in this simulation and based on the model’s location, different stimulus data was fed into Duburi’s microcontroller code and machine-vision algorithms to simulate the input from the sensors. The simulation was run on a sufficiently capable laptop and the microcontroller code and machine vision algorithms were run on the Duburi’s Arduino Mega and Jetson Nano respectively.
Interfacing
Duburi's microcontroller board, the Arduino Mega, strikes at the core of its operation. It functions as a control surface between the sensor payload's inputs and the actuators and end effectors on the Duburi, it manipulates the Duburi's thrusters in line with the data signals it receives to maintain steady locomotion.